欧拉角,一种描述三维旋转的方式,即将三维旋转描述分解为3个方向上的旋转。
例如:按$Z\rightarrow Y\rightarrow X$的顺序旋转,其中,
- 绕物体的Z轴旋转,得到偏航角yaw
- 绕旋转之后的Y轴旋转,得到俯仰角pitch
- 绕旋转之后的X轴旋转,得到滚转角roll
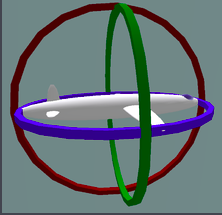
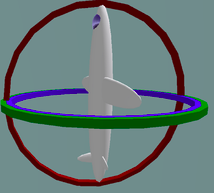
万向锁,欧拉角中的奇异性问题。即当$pitch=\pm{90^\circ}$时,旋转后的Z轴与原来的X轴重合,此时就会出现:之前先绕X轴旋转$\theta$,再绕Y轴旋转$\pm90^\circ$得到的结果等价于先绕Y轴旋转$\pm90^\circ$,再绕Z轴旋转$\theta$得到的结果,所以描述不唯一,就存在奇异性问题,所以欧拉角一般不做数学运算,多用于人机交互。
理论上可以证明,仅用三个实数表达三维旋转时,不可避免地存在奇异性问题。旋转向量也有奇异性问题,但出现少。